




Multi-Agent mobile manipulation
- Category: Robotics
- Client: King Abdullah University, KAUST
- Project date: 01 August, 2024
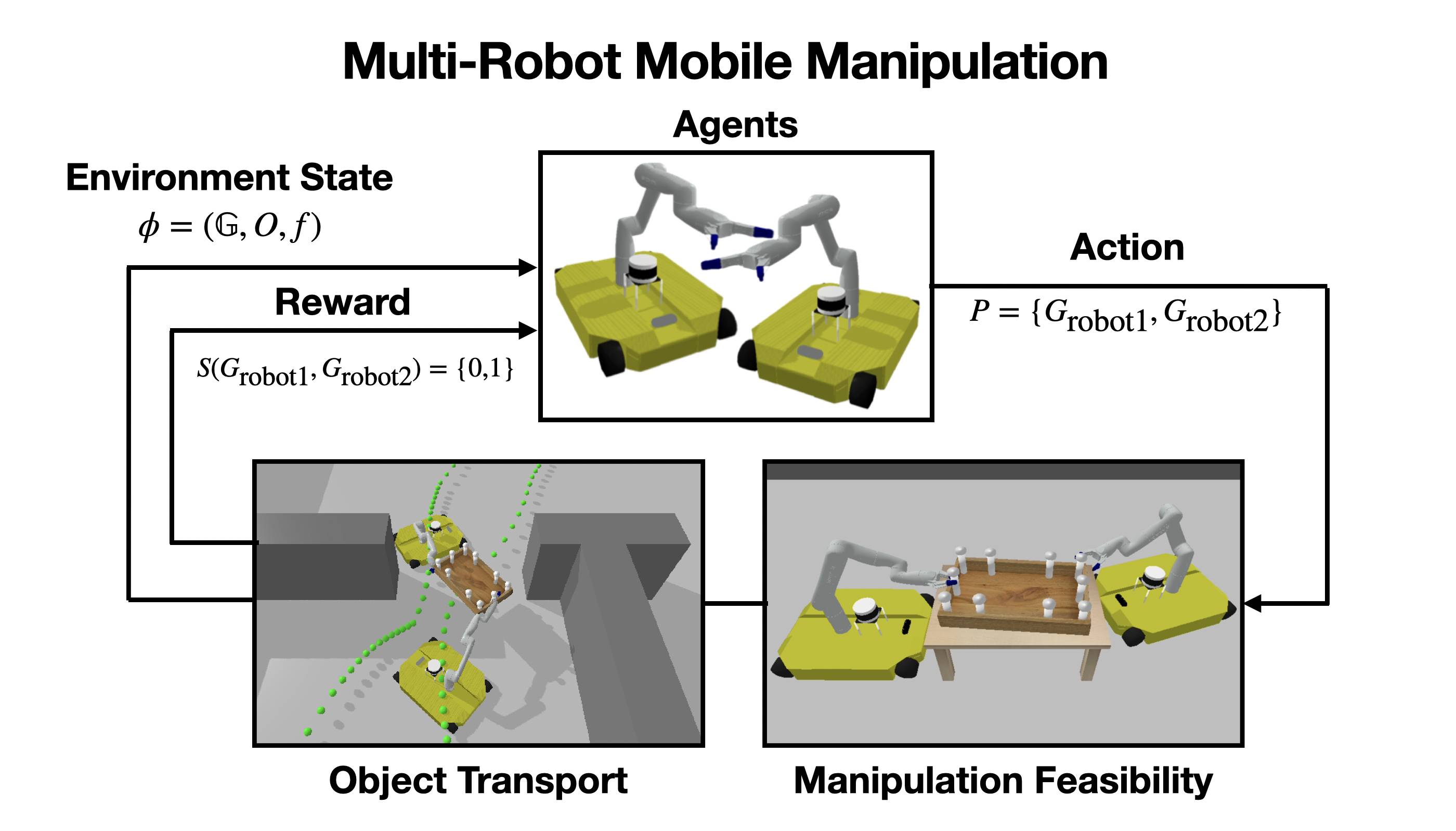
Multi-Agent mobile manipulation
I have been investigating multi-robot mobile manipulation by combining contrastive learning and convex optimization to identify feasible robot actions for transporting complex objects. This approach allows us to determine optimal configurations for the robots, enabling the system to compute an optimal trajectory in under one minute. We achieve this by using an optimization-based planner that integrates convex safe regions around the object (via IRIS-NP) and the robot configuration space. Integrating deep learning with optimization in this way not only facilitates cooperative manipulation but also creates a robust and efficient method to leverage the advantages of multi-robot cooperation. Thesis Link.